
Mechanistic and Ecological Approaches to Emotion: A Comparative Study
Mariana C. Broens[1]
UNESP – Universidade Estadual Paulista
Recebido: 06/09/2023
Received: 06/09/2023
Aprovado: 20/10/2023
Approved: 20/10/2023
Publicado: 29/12/2023
Published: 29/12/2023
Abstract
The aim of this article is to analyze and problematize the mechanistic and functionalist perspective of emotional processes in light of the ecological theory of perception/action. To this end, we present Marvin Minsky's (2006) proposal for emotional machines, for which emotional processes would be brain states that operate according to principles defended by the classical computational theory of mind. In contrast, we will present a proposal for the analysis of emotional processes inspired by the propositions of the ecological theory of perception/action (Gibson, 2015), in particular based on the concept of social affordance, that is, the possibilities of action that the bodily/gestural dynamics of agents offer directly to other agents, without the need for representational mediation. In such an analysis, we will try to highlight the relevance of co-evolutionary processes according to the principle of reciprocity and the adaptive role of emotional processes in social agents, which are overlooked by the classical computational approach to the mind, but are necessary for the effective instantiation of emotions, and not only for their recognition or simulation in robotic systems.
Keywords: Mechanistic approach to the mind; emotions, social affordances, mutuality, niche, robots.
The Emotional Machines of Marvin Minsky
Each of our major “emotional states” results from turning certain resources on while turning certain others off — and thus changing some ways that our brains behave.
Marvin Minski
In the Artificial Intelligence (AI) project that developed from the 1950s onward, the central interest of cognitive scientists was directed toward the development of mechanical models capable of simulating/instantiating logical-mathematical abilities that were considered to be high level and more easily quantifiable. This does not mean that emotional abilities were not considered relevant by computer scientists, but rather that the complexity of these abilities and the low processing capacity of the first artificial systems were recognized.
More than 50 years after the beginning of the AI project, Marvin Minsky, one of the pioneers of research in the field, in a work entitled The emotion machine: Commonsense Thinking, Artificial Intelligence, and the Future of the Human Mind, begins a reflection on the possibility of the existence of “artificial emotional machines”. Minsky (2006) points out that such a possibility would be considered absurd by most people because, according to common sense, machines would be very efficient at performing mechanical tasks, such as complex calculations or the automated assembly of vehicles, but would be incapable, for example, of loving. For Minsky (2006), no one finds it surprising that machines are capable of performing complex logical operations, since such operations are carried out through a restricted set of mechanically realizable inferential rules. On the contrary, for most people, love would not be explainable by physical laws, and no machine will be able to instantiate emotions, feelings, and consciousness.
Minsky (2006) points out that the successful strategies of physics - explaining complex phenomena with simple principles - are not capable of explaining brain processes that instantiate complex functions, despite the attempts of psychologists and neuroscientists to do so. He suggests that the mentalistic vocabulary of popular psychology gives a false sense of simplicity and success by using terms that have no precise referent, but effectively designate complex and multiple brain processes. Thus, Minsky suggests that: “[...] instead of looking for simple explanations, we need to find more complicated ways to explain our most familiar mental events” (2006, p. 2). The best way to understand what emotions consist of will be to understand what brain processes occur when we feel each emotion. In the same vein as Alan Turing (1950), who points out the futility of asking unanswerable questions, questions such as: “What are thoughts and emotions?” will not allow us to make progress in explaining emotional processes, because questions about the nature or essential properties of something are inappropriate in the functionalist perspective proposed by Minsky:
[...] o comportamento de uma máquina complexa depende apenas da forma como as suas partes interagem, mas não do “material” de que são feitas (exceto em questões de velocidade e força). Por outras palavras, tudo o que importa é a forma como cada peça reage às outras peças a que está ligada (p. 22).
According to Minsky (2006), however, recognizing the complexity of the problems involved in explaining emotions and consciousness does not make the task of explanation more difficult, but actually makes it easier, because it allows the method of analysis and synthesis to be applied, breaking down complex puzzles into new and smaller problems that are still difficult to solve, but no longer intractable. In applying the method of analysis, Minsky points out that the brain has a large set of “resources”, which he illustrates with the following figure:
Figure 1 – Representation of the brain’s “resources”.
Fonte: Minsky, 2006, p. 3.
Specific combinations of these brain resources could explain, among countless other processes (such as those directly related to survival), the wide variety of emotions. Anger and fear, for example, would mobilize resources of aggression and prudence, respectively. Compassion would involve resources of care, sadness, introspection, joy, happiness, and so on, resulting from different combinations of brain resources, as Minsky (2006) has illustrated in relation to the emotions of fear and anger, but also to the sensations of thirst and hunger:
Figure 2 - Combinations of brain resources responsible for different functions
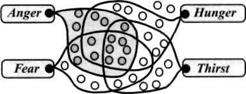
Fonte: Minsky, 2006, p. 4.
In this way, Minsky (2006) offers an analytical tool that, according to him, would make it possible to understand and instantiate different resources in artificial machines, the combination of which would make it possible to emulate emotions present in brains, in other words, in natural machines. To demonstrate the usefulness of his analytical method, Minsky (2006) turns to the analysis of love.
First, in the mentalistic vocabulary of popular psychology, love could be characterized as a strong personal attachment to another person, a deep affection for another person, and so on. It is clear that these and similar characterizations do not clarify the nature of the processes involved in this emotion. For example, a person experiencing a love relationship might describe his or her emotion using the vocabulary of popular psychology as follows:
I've just fallen in love with a wonderful person. I scarcely can think about anything else. My sweetheart is unbelievably perfect — of indescribable beauty, flawless character, and incredible intelligence. There is nothing I would not do for her (p. 10).
Minsky (2006) points out that although the above account seems positive, beneficial, and auspicious, the sentences are superlative and various qualities attributed to the loved one begin with negation prefixes (“incredible”, “indescribable”, “unbelievable”). Minsky then does a kind of translation of what each of these sentences would actually mean:
Wonderful. Indescribable. (I can't figure out what attracts me to her.)
I scarcely can think of anything else. (Most of my mind has stopped working.) Unbelievably perfect. Incredible. (No sensible person believes such things.) She has a flawless character. (I've abandoned my critical faculties.) There is nothing I would not do for her. (I've forsaken most of my usual goals) (2006, p. 10).
Reading this translation of the love story proposed by Minsky (2006), many people may be surprised and shocked by its apparent crudeness and reductionist simplism. After all, is it legitimate to consider love, one of the deepest and most cherished human emotions, as a process that would disconnect brain resources related to inferential capacity, prudence, critical reasoning, and existential purposes? And how can we admit that emotions operate according to a set of logical rules of conjunctive, disjunctive, and negation?
But if we put aside our initial surprise and take a more objective stance, it seems that we must recognize, with Minsky (2006), that there can be a lot of machinations and reactions in the behaviors associated with states of love. Furthermore, it seems necessary to point out that biochemical mechanisms are associated with emotional states such as love, fear, and anger, and the behaviors correlated with such states. This reactive and mechanical nature of emotional states in general is particularly evident in the way certain addictive substances affect the behavioral patterns of their users, especially in cases of chemical dependency.
The causal interaction between biological mechanisms and our brain resources (including emotional ones) allows Minsky (2006) to suggest that “love”, like countless other terms in our emotional vocabulary, has many different meanings and refers to not just one but several states and processes: it is an “umbrella” word that encompasses, for example, maternal love, the most ardent passion, and the feeling that underlies long friendships. For him, however, all the meanings of the word love have in common that they make people think differently. In other words, emotional states would be particular kinds of “ways of thinking”, understood as the processing of incoming information or inputs that allow certain brain resources to be activated and others to be inhibited (2006, p. 12). In short, humans are natural machines with a sophisticated information processing system, the brain, that operates causally. However, given the human ability to operate with second-order thoughts, in other words, to reflect on the nature of our own thought processes, the realization that we are complex machines would not necessarily diminish our human self-esteem and could enhance our sense of responsibility (Minsky, 2006, p. 2).
As has been pointed out, explaining the various emotional processes depends on examining which brain resources or programs are activated in the brain as a result of the inputs received. In Marvin Minsky's functionalist perspective, what matters is the capacity for interaction between the parts of the system, not the material substrate that instantiates them. But would any material substrate be capable of instantiating equivalent interactions? As noted above, Minsky recognizes two exceptions to functionalism when it comes to speed and force (2006, p. 22). In these two cases, the material instance or “what” the artifact is made of would be relevant, otherwise the mechanism would not be able to instantiate the expected performance (e.g., an engine made of paper would not be able to move a car). In the same vein, we could ask: what guarantees that the instantiation of emotions doesn't also require a specific physicochemical substrate capable of performing specific interactions? If so, what would these interactions be, and what could be their specificity? We can even agree with Minsky when he emphasizes the relevance of interactions between parts in complex machines, as would be the case with the brain resources he refers to, since physical instances with different properties can ultimately perform functions with similar results. But this doesn't mean that any physical substrate is capable of instantiating the kind of interaction involving different levels of complexity that led to emotions in natural agents.
When emotions are explained as “ways of thinking” in which different resources or programs are activated or inhibited, they are dissociated from the long evolutionary path that constituted them, that is, from the long process that led to their emergence in natural agents. Love, in evolutionary terms, would remain a polysemic term denoting complex processes, but in general it would be described as an emotion that plays an adaptive and aggregating role for ecologically situated agents, bringing them together around common goals linked to the maintenance or survival of a group.
In the same way, evolutionary biology suggests that the physiological manifestations associated by Minsky (2006) with fear, as alarm signals in the face of danger, would have resulted from adaptive processes of the species as instruments to allow the survival of the individual in the face of dynamic, not always favorable environmental conditions, especially in the face of threats from predators. Given the importance of the ecological processes that led to the emergence of emotions in different species, is a mechanistic explanatory model centered on brain processes satisfactory? Is it correct to separate explanations of the nature of emotional processes from the complex and long co-evolutionary flow responsible for their emergence and development? As an alternative to the explanatory model of emotional processes proposed by Marvin Minsky (2006), in the next section we present an ecological and contextually situated perspective on interactions involving emotions in living beings.
An ecological approach to emotions
Direct perception theory is deeply critical of the cognitivist, mechanistic approach to perception and cognitive processes in general, such as that proposed by Marvin Minsky. One of the main proponents of direct perception theory, or perception/action theory, was James J. Gibson in his work Ecological approach of visual perception (2015). In this work, Gibson problematizes the cognitivist conception of perception, which can be summarized as considering sensitive data as inputs that are then processed by the brain (or an artificial information processor) and subsequently produce behavioral outputs. For Gibson, on the other hand, ecological niches directly provide action possibilities for agents, human or otherwise, through the intrinsically significant information available in them. The information present in niches would, according to Gibson (2015), guide the dynamic behavioral flow of agents interacting with each other and with the ecological context of which they are a part.
Gibson (2015) proposes the concept of affordance to describe the possibilities for action that exist in ecological niches. Gibson (2015):
The affordances of the environment are what it offers the animal, what it provides or furnishes, either for good or ill. The verb to afford is found in the dictionary, but the noun affordance is not. I have made it up. I mean by it something that refers to both the environment and the animal in a way that no existing term does. It implies the complementarity of the animal and the environment (p. 119).
In this way, affordances would be directly perceptible to agents situated and embedded in their ecological contexts or niches, as they share a co-evolutionary adaptive history of complementarity or mutuality. The agent-niche mutuality relationship can be formulated as follows: “A situation or event X provides an activity Y for an organism Z only if certain mutual compatibility relations hold between X and Z” (Alley, 1985, p. 419).
The coevolutionary trajectory of agents and niches would have allowed for the constitution of ecological invariants, that is, dynamic invariants of long duration resulting from environmental change and agent-environment interactions, that is, allowing for both permanence and change in ecological systems (Gibson, 2015). Examples of such invariants would be the apparent movement of the sun, which creates local cycles of light and shade; the way light is reflected or absorbed by the surfaces of substances; the surfaces of the components of niches with which agents interact; substances or parts of the environment that do not allow living things to move; the terrestrial, aerial, or liquid means by which different species move and provide different patterns of locomotion, and so on. Thus, the dynamic, non-mechanical stability of niches, or the set of affordances that describe how animals live (Gibson, 2015, p. 120), derives from structural invariants, such as substances and surfaces, and transformational invariants, which refer to the different patterns of locomotion of organisms in different environments (terrestrial, liquid, aerial etc.).
Thus, the environment can be described in terms of media, substances, and surfaces that allow for both persistence and change. For Gibson, describing the environment in terms of its ecological components would be superior to physical descriptions (made in terms of space, time, matter and body) because “[...] it is appropriate to the study of the perception and behavior of animals and humans as a function of what the environment offers, that is, to psychology” (2015, p. 18).
Then, among the dynamic surfaces with different layouts present in the niches would be the surfaces of the organisms themselves, whose dynamic mutual interactions with the environment produce a subset of affordances called social affordances:
What the other animal affords the observer is not only behavior but also social interaction. As one moves so does the other, the one sequence of action being suited to the other in a kind of behavioral loop. All social interaction is of this sort—sexual, maternal, competitive, cooperative—or it may be social grooming, play, and even human conversation (Gibson, 2015, p. 36, emphasis added).
In an article entitled Toward an Ecological Theory of Social Perception, Leslie Z. McArthur and Reuben M. Baron (1983) use the concept of social affordances to refer specifically to the possibilities for action that organisms of the same species or even of different species offer each other directly through gestures specific to their body dynamics, facial expressions, vocalizations, touches, mutual interactions in general, such as dancing or walking, among many others. Like affordances in general, social affordances are directly perceptible and intrinsically significant in the body dynamics of organisms, and would present a permanence under change in accordance with (1) structural dynamic invariants that refer to the surface and layout of the body of each species, for example, skin, fur, scales, feathers, which change throughout the life of the organism (e.g., wrinkling of the skin and whitening of the hair), and (2) transformational invariants, which refer to the different dynamics of movement and locomotion of organisms, since the body structure of each species simultaneously establishes possibilities for action and limitations or constraints[2].
In particular, gestural dynamics, vocalizations, and facial expressions provide opportunities for emotional interaction between agents, especially with respect to emotions that are considered basic or primary, such as joy, fear, sadness, surprise, disgust, and anger. We believe that the immediate perception of opportunities for social action offered by emotional interactions with social affordances can perhaps be better understood on the basis of studies of infants' ability to interact socially in meaningful ways.
In a paper entitled Perceiving Social Affordances: The Development of Emotion Understanding, Arlene S. Walker-Andrews points out that there is a consensus that the ability to interact emotionally with other agents develops progressively in babies, but how this development occurs and when babies are able to interact skillfully by recognizing specific emotions are still hotly debated questions in psychology. Walker-Andrews (2013) points out that such questions involve a large number of variables, such as: “[...] the fidelity of the expression, the mode of expression (facial, vocal), the particular emotion being expressed, and perhaps who is portraying the emotion” (p. 151). According to Walker-Andrews (2013), the large number of variables has made studies on the subject difficult, but she points out that a careful review of the literature leads to the conclusion that the ability to recognize the dynamics of facial expressions begins approximately from the third month of life, and in more conservative studies, the ability is consolidated from the seventh month.
It is noteworthy that this ability in babies precedes the period in which proper linguistic communication skills are developed, contrary to what Lindquist, Satpute & Gendron (2015) argue, for whom the role of language would go beyond the communication of emotions, as it would agglutinate and categorize sensations using emotional terms. However, the ability of babies to interact emotionally prior to the acquisition of language skills seems to indicate at least some autonomy of the former with respect to the latter.
Walker-Andrews (2013) also points out that emotion perception involves a number of interrelated and interdependent abilities, namely: (a) perceiving information about a particular emotion, (b) discriminating between different emotional expressions, and (c) perceiving the meaning of the emotional expression (p. 152). Given these abilities, the author argues that babies' abilities to interact emotionally with others result from the perception of multimodal emotional social affordances, i.e., involving visual, tactile, vocal interactions etc.
In the wake of perception/action theory, Walker-Andrews (2013) also points to the significant importance of the context in which babies' emotional interactions take place. She points out that: “[...] when a person displays an emotional expression, the voice is synchronized with facial movements, the intensity of voice, face, and touch are likely to be correlated, and information specific to the emotion is present in all modes” (2013, p. 156). In particular, the author emphasizes the role of multimodal dynamics in infants' emotional interactions, since the recognition of decontextualized and static emotional expressions in photographs, for example, occurs later, according to experiments conducted by Ekman & Oster (1979). The relevance of context in the multimodal dynamics of interactions is due in particular to the fact that emotional interactions between social agents, including babies, play a clear communicative role. For example, the dynamics of perceiving a caregiver's smile is often accompanied by a series of actions that are intrinsically important to the baby's well-being.
In this way, the ability of agents to interact emotionally would result from the perception of multimodal social affordances (which include, in addition to facial expressions, gestures in general, vocalizations, touches, for example) that would communicate to each other intrinsically significant information about joy, sadness, anger, disgust, surprise, or fear, among other emotions. As we have pointed out, direct interactions between social agents, of the same or different species, involving social affordances, take on significance in ecological niches due to a long-lasting adaptive co-evolutionary trajectory that involves invariants of permanence under change, adaptation, constraint and chance, the latter manifesting itself in various processes, such as genetic mutations and sudden environmental changes.
We can see that there are significant differences between the mechanistic and ecological approaches to emotions. For the mechanistic, functionalist, internalist, and cerebrocentric approach proposed by Minsky (2006), emotions, like any other mental states, could be conceived as “ways of thinking” resulting from the combination and processing of different brain resources, activating some and inhibiting others depending on the sensory stimuli received. From an ecological perspective, on the other hand, the perception of the social affordances of facial expressions and other multimodal bodily gestures of ecologically situated agents in their niches would (1) be intrinsically significant due to the co-evolutionary and mutualistic trajectory of the species and the learning of agents situated in their niches, and (2) directly enable other agents to perform actions of flight, immobility, congeniality, care, defense, aggressiveness, altruism, or nausea, which are called emotions in the common vocabulary.
Despite the significant theoretical differences between the two approaches, the mechanistic/functionalist and the ecological/co-evolutionary, there are currently efforts in robotics (Chemero & Turvey, 2007, Sahin et al. 2007, Ridge & UDE, 2013, Ardón et al., 2019) to build robots capable of detecting affordances, especially social ones, and acting in uncontrolled environments according to the detected affordances.
In a relevant and exhaustive compilation of attempts to build robots capable of detecting affordances, Ardón et al. (2019) point out that the definition of affordance proposed by Gibson (2015), according to the minimalist interpretation they propose: “[...] an affordance refers to the ability to perform a certain action with an object in a given environment”, has generated controversy among psychologists and computer scientists, who have subsequently proposed some limitations to the original definition.
As an example of these new definitions, Ardón et al. (2019) cite the one proposed by McGrenere & Ho (2000), according to which “[...] an object's affordance exists independently of the individual's ability to perceive its action possibility”, which omits the agent-environment relational dimension central to Gibson's characterization. Moreover, Ardón et al. (2019) point out that the division into three types of affordances proposed by Gaver (1991, p. 80) would have been fundamental to the possibility of robots perceiving affordances, since most robotic agents rely on their sensors to perceive the environment. The characterization of affordances proposed by William W. Gaver suggests that there would be:
[...] (i) false affordance which is a perceived affordance that does not have a real function (e.g. a placebo button), (ii) hidden affordances which are those that are not evident for the agent but they exist, and (iii) perceptible affordance which are the ones where the information is available such that the agent can perceive them and act on them (Ardón et al., p. 2).
However, we understand that the characterizations of affordances, when limited and adapted to the needs of their robotic simulation, begin to presuppose functionalist theses (in the best cognitivist tradition) and leave aside the truly ecological aspects of the co-evolutionary mutuality of agent and niche, which presuppose an ecological conception of information and the direct perception of action possibilities in the environment.
On the other hand, intelligent automated and multimodal emotion recognition systems have been proposed in recent years using different methodologies and techniques (Imani & Montazer, 2019; Maithri et al., 2022), such as machine learning, speech processing, Bayesian networks and deep neural networks. However, in a study on the state of the art in automated emotion recognition (in facial expressions, voice, vital signs, gestures, among others), Maithri et al. (2022) point out that research has shown progress, especially when it comes to controlled contexts, but there are still significant limitations that affect the results. Specifically, Maithri et al. (2022) conclude that their study:
[…] reveals that most of the proposed machine and deep learning-based systems have yielded good performances for automated ER [emotion recognition] in a controlled environment. However, there is a need to obtain high performance for ER even in an uncontrolled environment (p. 1).
In summary, given the theoretical differences between the mechanistic/functionalist perspective on emotions and the ecological/co-evolutionary perspective, and given that the human social-ecological context is complex and dynamic, involving situations that are not easily predictable, the production of robotic systems that interact with human agents by recognizing social-emotional affordances still seems a long way off, even if we adopt more flexible mechanistic and ecological principles that allow for partial, moderate compatibility between the two perspectives.
Concluding remarks
We begin this article with a critical analysis of the mechanistic and functionalist approach to emotions proposed by Marvin Minsky (2006), according to which emotions result from brain resources, the various combinations of which, by activating or inhibiting one or the other, produce the various emotional states of natural or artificial agents. The outrageous example of translating the description of a loving state in common language to indicate which brain resources are activated or inhibited illustrates the general principle proposed by Minsky that emotions, like many other mental states, are “ways of thinking” and can therefore be instantiated in an artificial cognitive system.
Next, we present an ecological approach to emotions based on the central concept of affordance coined by James J. Gibson (2015). We emphasize that, according to the ecological perspective of direct perception or perception/action, agents directly perceive action possibilities in their niche as a result of a long coevolutionary history of agent-environment mutuality within species and learning within individuals. In particular, we point out that agents offer each other countless possibilities for action through so-called social affordances, which include facial expressions, vocalizations, body gestures, touches, and other multimodal forms of interaction that provide other agents with actions such as flight, immobility, comfort, care, defense, aggression, altruism, or nausea, which in common language are called emotions. We should also point out that experimental data obtained in developmental psychology studies on human babies (Walker-Andrews, 2013) seem to support ecological theses according to which the emotional information offered by caregivers would be directly perceptible by babies long before the acquisition of language skills and would provide different patterns of action.
Finally, we investigated whether, despite the differences between the two, it would be possible to make the mechanistic/functionalist approach to emotions and the ecological/co-evolutionary approach compatible. In other words, whether it would be possible to build robotic systems capable of interacting ecologically with natural agents by instantiating affordances, especially social affordances, that enable emotional interactions involving caring and cooperative practices between natural and artificial agents.
We have found that there seems to be a difficulty in terms of the principles used to bring about this approach, because the mechanistic, functionalist, and brain-centered approach to emotions ignores the relevance of substances, both in an ecological sense and in a physical sense, for the instantiation of affordances. Contrary to functionalist principles, it should be noted that organic molecules have specific physicochemical properties that allowed them to give rise to the first forms of life on the planet and, consequently, after billions of years of complex adaptive evolutionary processes, to give rise to the natural species that led to the emergence of emotional interactions such as love and fear (Loewenstein, 1999).
The mechanistic approach also ignores the relevance of agent-environment reciprocity, which is central to perception/action theory. The interdependence between different species and the ecological context they create for themselves in their niches is characterized by the dynamic emergence of forms of adaptation for the general benefit of the species and the environment, even though they often appear uncharitable to individuals (e.g., predator-prey interdependencies). Furthermore, it is important to note that the mechanistic approach proposed by Minsky (2006) reduces emotions to ways of thinking, to different combinations of activated or inhibited brain resources, a thesis that is untenable from the point of view of the theory of direct perception, for which the perception of affordances dispenses with any kind of representational mediation carried out by the brain.
The analysis of the two perspectives presented here seems to indicate that there are differences, perhaps insurmountable, between the project of creating machines capable of interacting by recognizing ways of thinking with emotional content, the project of creating robotic systems capable of perceiving social affordances that indicate possibilities for emotional action, and robotic systems that effectively instantiate social affordances, which would lead to more robust interactions with natural agents and the development of new adaptive processes.
Perhaps in the not too distant future, research in psychology and the development of technologies will allow us to formulate new theories that will allow us to understand, at least with a minimum of clarity, what emotional interactions between natural agents consist of, and whether artificial agents can effectively instantiate similar interactions.
References
ALLEY, T, R. Organism-environment mutuality epistemics, and the concept of an ecological niche. In: Synthese 65 (1985) 411-444.
ARDÓN, P., PAIRET, E., LOHAN, K. S. RAMAMOORTHY, S. & PETRICK, R. P. A. Affordances in Robotic Tasks - A Survey. In: IEEE Transaction on Robotics, vol. XX, no. X, December 2019.
CHEMERO, A. Radical Embodied Cognitive Science, Cambridge, MA: MIT Press, 2009.
CHEMERO, A. A. & TURVEY, M. T. Gibsonian affordances for roboticists. In: Adaptive Behavior, vol.15, no 4, p. 473–480, 2007.
EKMAN, P., & OSTER, H. Facial’ expressions of emotion. In: Annual Review of Psychology, 1979, 30, p. 527-554.
GAVER, W. W. Technology affordances. In: Proceedings of the SIGCHI conference on Human factors in computing systems. ACM, 1991, p. 79–84.
GIBSON, J. J. The ecological approach of visual perception. Classic edition. New York: Psychology Press, 2015.
IMANI, M. & MONTAZER, G. A. A survey of emotion recognition methods with emphasis on E-Learning environments. In: Journal of Network and Computer Applications, Volume 147,102423, 2019. Acesso em 15/06/2023. Disponível em: https://www.researchgate.net/publication/335425375_A_survey_of_emotion_recognition_methods_with_emphasis_on_E-Learning_environments#fullTextFileContent. Acessado em: 23 de fevereiro de 2023.
LINDQUIST, K. A.; SATPUTE, A. B. & GENDRON, M. Does Language Do More Than Communicate Emotion? In: Current Directions in Psychological Science. Volume 24, Issue 2, 2015.
LOEWENSTEIN, W. R. The touchstone of life: Molecular information, cell communication and the foundations of life. New York-Oxford: Oxford University Press, 1999.
MAITHRI, M., RAGHAVENDRA, U., GUDIGAR, A., SAMANTH, J., BARUA, P. D., MURUGAPPAN, M., CHAKOLE, Y., U. & ACHARYA, U. R. Automated emotion recognition: Current trends and future perspectives, Computer Methods and Programs. In: Biomedicine, Volume 215, 2022.
MCARTHUR, L. Z. & BARON, R. M. Toward an Ecological Theory of Social Perception. Psychological Review, vol. 90, no. 3, 215-238, 1983.
McGRENERE, J. & HO, W. Affordances: Clarifying and evolving a concept. In: Graphics interface, 2000, p. 179–186.
MINSKY, M. The emotion machine: Commonsense Thinking, Artificial Intelligence, and the Future of the Human Mind. New York: Simon & Schuster, 2006.
RIDGE, B. & UDE, A. Action-grounded push affordance boots trapping of unknown objects. In: 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2013, p. 2791–2798.
SAHIN, E., ÇAKMAK, M., DOGAR, M. R., UGUR, E & UÇOLUK, G. To afford or not to afford: A new formalization of affordances toward affordance-based robot control. Adaptive Behavior, vol.15, no.4, p. 447–472, 2007.
TURING, A. Computing Machinery and Intelligence. Mind, Volume LIX, Issue 236, October 1950, Pages 433–460, 1950. Acesso em 11/10/2023. Disponível em: https://edisciplinas.usp.br/pluginfile.php/7583067/mod_resource/content/1/TuringComputing.pdf.
WALKER-ANDREWS, A. S. Perceiving Social Affordances: The Development of Emotion Understanding. In: Horner, B. D., Tamis LeMonda, C. S. (Eds.) The development of social cognition and communication. New York, NY: Psychology Press, 2013.
Mariana C. Broens
Doutora em Filosofia pela USP e Professora do Departamento e da Pós-graduação em Filosofia da UNESP-Marília. É bolsista produtividade 2.
The texts of this article were reviewed by third parties and submitted for validation by the author(s) before publication