

2.png)





































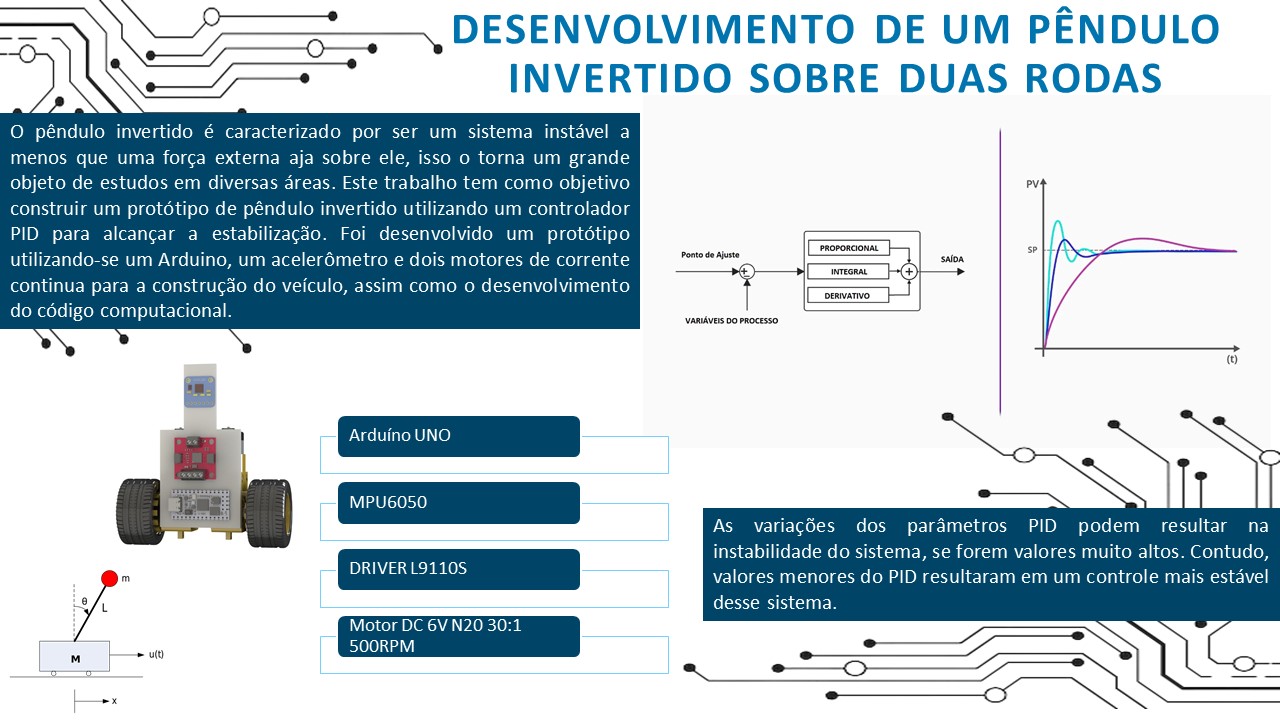
Desenvolvimento de um pêndulo invertido sobre duas rodas
- Autores
-
-
Autor
-
Guilherme Viriato Leal
Universidade Federal de Catalão - UFCAT
Autor
-
- Palavras-chave:
- Acelerômetro, Arduino, Pêndulo invertido, PID
- Resumo
-
O pêndulo invertido é caracterizado por ser um sistema instável a menos que uma força externa aja sobre ele, isso o torna um grande objeto de estudos em diversas áreas. Este trabalho tem como objetivo construir um protótipo de pêndulo invertido utilizando um controlador PID para alcançar a estabilização. Foi desenvolvido um protótipo utilizando-se um Arduino, um acelerômetro e dois motores de corrente continua para a construção do veículo, assim como o desenvolvimento do código computacional. As variações dos parâmetros PID podem resultar na instabilidade do sistema, se forem valores muito altos. Contudo, valores menores do PID resultaram em um controle mais estável desse sistema.
- Referências
-
Alvarenga, V. L. (2013). Identificação de uma plataforma de um pêndulo invertido e simulação de técnicas de controle. (Dissertação de mestrado). Universidade Federal e Lavras, Lavras, MG, Brasil. Recuperado de http://repositorio.ufla.br/bitstream/1/35325/1/DISSERTA%C3%87%C3%83O_Identifica%C3%A7%C3%A3o%20de%20uma%20plataforma%20de%20um%20p%C3%AAndulo%20invertido%20e%20simula%C3%A7%C3%A3o%20de%20t%C3%A9cnicas%20de%20controle.pdf
Laboratório de garagem. (2012). Controlador PID (Proporcional-Integral-Derivativo) - Parte 1-Introdução. Recuperado de https://labdegaragem.com/m/blogpost?id=6223006%3ABlogPost%3A154959
Franklin, G. F., Powell, J. D., & Emani-Naeini, A. (2013). Sistemas de Controle para Engenharia. 6a ed. Porto Alegre: Bookman.
Frutos, M. A. de. (2013). VertiBOT. Recuperado de https://madebyfrutos.wordpress.com/2013/05/02/vertibot/
Ogata, K. (2010). Engenharia de Controle Moderno. 5a ed. São Paulo: Pearson.
Paula, A. R. de. (2014). Modelagem e controle do pêndulo invertido sobre duas rodas. (Dissertação de graduação). Universidade Federal do Ceará, Fortaleza, CE, Brasil. Recuperado de http://www.dee.ufc.br/anexos/TCCs/2014.2/ADRIANO%20RODRIGUES%20DE%20PAULA.pdf
Pedroso, C. C. de S. & Modesto, E. L. P. (2017). Sistema de controle de pêndulo invertido. (Dissertação de graduação). Universidade Tecnológica Federal do Paraná, Curitiba, PR, Brasil. Recuperado de http://riut.utfpr.edu.br/jspui/bitstream/1/9505/1/CT_COMET_2017_2_06.pdf
Prado, I. F., do. (2011) Construção e Controle do Sistema Pêndulo invertido. (Dissertação de graduação). Instituto Federal da Bahia, Vitória da Conquista, BA, Brasil. Recuperado de https://physika.info/site/documents/Prado2011.pdf
Ribeiro, R. (2007). Implementação de um sistema de controle de um pêndulo invertido. (Dissertação de mestrado). Universidade Federal de Itajubá, Itajubá, MG, Brasil. Recuperado de https://silo.tips/download/implementaao-de-um-sistema-de-controle-de-um-pendulo-invertido
Silva, E. A., de. (2013) Construção, modelagem e controle de um pêndulo invertido com CLP e software scada. (Dissertação de mestrado). Universidade Estadual Paulista, Ilha Solteira, SP, Brasil. Recuperado de https://repositorio.unesp.br/bitstream/handle/11449/87080/silva_ea_me_ilha.pdf?sequence=1
Silva, G. D. (2017). Projeto, modelagem, simulação, construção e controle de um veículo de duas rodas pêndulo invertido. (Monografia de graduação). Universidade Federal de Uberlândia, Uberlândia, MG, Brasil. Recuperado de https://repositorio.ufu.br/bitstream/123456789/25442/3/ProjetoModelagemSimula%C3%A7%C3%A3o.pdf
Welch, G. & Bishop, G. (1995). An Introduction to the Kalman Filter. University of North Carolina at Chapel Hill, Chapel Hill, NC, USA. Recuperado de https://www.cs.unc.edu/~welch/media/pdf/kalman_intro.pdf
- Cover Image
-
- Downloads
- Publicado
- 23.10.2023
- Seção
- ENGENHARIA DE OPERAÇÕES E PROCESSOS DA PRODUÇÃO
- Licença
-
Direitos autorais (c) 2023 Guilherme Viriato Leal, Ricardo Ribeiro Moura (Autor)

Este trabalho está licenciado sob uma licença Creative Commons Attribution 4.0 International License.
Qualquer pessoa pode copiar, distribuir, exibir, adaptar, remixar e até utilizar comercialmente os conteúdos publicados na revista; Desde que sejam atribuídos os devidos créditos aos autores e à BJPE como fonte original; Não é exigida permissão adicional para reutilização, desde que respeitados os termos da licença. Esta política está em conformidade com os princípios do acesso aberto, promovendo a ampla disseminação do conhecimento científico. 🔗 CC BY 4.0
